Robootika kolm põhiseadust.
Robootika kolm põhiseadust on reeglid, mille mõtles välja ulmekirjanik Isaac Asimov. Reeglid ilmusid esmakordselt 1942. aastal Asimovi lühijutus “Runaround”. Need kolm reeglit on järgmised:
- Robot ei tohi oma tegevuse ega tegevusetusega inimesele kahju teha.
- Robot peab alluma inimese antud käsule, kui see ei lähe vastuollu esimese seadusega.
- .Robot peab kaitsma oma olemasolu, kuni see ei ole vastuolus esimese või teise seadusega.
Peale nende kolme seaduse mõtles Asimov hiljem välja ka nullseaduse, mis on järgmine:
0. Robot ei tohi oma tegevuse või tegevusetusega inimkonnale kahju teha.
Vasta küsimustele
- Mis on robot? Maailma esimene robot.
- Robotite arendamis põlvkonnad. Nimeta ja seleta.
- Miks manipulaatorid ei ole robotid?
- Mis on masinate eelised võrreldes inimtööjõuga?
- Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
- Millistes Eesti tööstusettevõtetes võiksid mehhatroonikud töötada?
1. Robot on konstrueeritud teatud ülesannete täitmiseks, maailma esimene robot on Unimate
- Esimene põlvkond. Esimese põlvkonna robotid olid lihtsa ehitusega ning neil puudusümbrusetaju ehk andurid. Oma tööd suutsid nad teha vaid mittemuutuvates tingimustes.Näiteks robotkäsi, mis tõstab õlletehases pudeleid kastidesse. Robot sooritab identseidliigutusi, aga kuna tal ei ole ümbritsevast keskkonnast mitte mingit signaali, st ta ei saa omategevuse kohta mittemingisugust tagasisidet, siis keskonna muutuse korral ta enam ei töötakorralikult. Selliseid roboteid tänapäeval enam ei loetagi õigeteks robotiteks.
- Teine põlvkond. Teise põlvkonda kuuluvad robotid (vt joonis 2), mis suudavad andurite läbireageerida keskkonnas toimuvatele muutustele. Kuna robot suudab keskkonda tunnetada, siisroboti efektiivsus oleneb suures osas tarkvarast, mis teda juhib. Ka antud kursuse käiguskasutatavad robotid kuuluvad kõik teise põlvkonda, kui kasutada neil andureid keskkonnatunnetamiseks ning programmeerida nad iseseisvalt tegutsema.
- Kolmas põlvkond. Kolmas põlvkond on veel väljatöötamisel. Kolmanda põlvkonna robotidsuudavad olukordi analüüsida ning õppida. Näiteks filmis „Mina, Robot” olev robot, mis suudabjäreldusi teha ning sellest õppida, on kolmandast põlvkonnast.
Liigita järgnevad robotid põlvkondade kaupa:
- nõudepesumasin,
- fikseeritud liikumisega
- robotkäsi,
- automaatselt süttiv lamp,
- ise keeli õppiv robot.
Miks manipulaatorid ei ole robotid?
kaugjuhitav seade, mida kontrollib enamasti eemalt inimene. Manipulaatori ülesanne on olla inimese meelte ja lihaste pikenduseks. See tähendab, et läbi manipulaatori saab kontrollija informatsiooni väliskeskkonna kohta ja saab manipulaatori abiga keskkonda muuta. Keerulisemaid manipulaatoreid on “pommirobot”.
Mis on masinate eelised võrreldes inimtööjõuga?
pidavald töötavad pole vaja puhkus
Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
andur kontroller täitur
Kirjuta definitsioonid:
- Robot – Mehanism andur kontroller täitur
- Robootika – Programmeriv kond
- Manipulaator – masin kellel on käsi ja ta teeb ühe ülesanne
- Mehhatroonika – Multidistsiplinaarne valdkond
- Andur – Seade mis tuvastab ja reageerib mõnele keskkonale
- Täitur – Seade mis muundab energia liikumiseks
- Kontroller – Seade või programm, mis juhib süsteemi toimimist, tavaliselt sisendite töötlemise ja väljundite väljastamise kaudu soovitud tulemuse saavutamiseks.
robot atlas esimene versioon oli tehtud 2013 on 1.88 152.4kg
robot töödab operaatori järgi
ta on tehtud inimeste jaoks et teha nende elu lihtsamaks näiteks lihtsasdada elu
цель likvideerimine опасных задать
tal on suur manevreerimine


Понятие электричества
- Электричество: Физическое явление, связанное с движением и взаимодействием заряженных частиц.
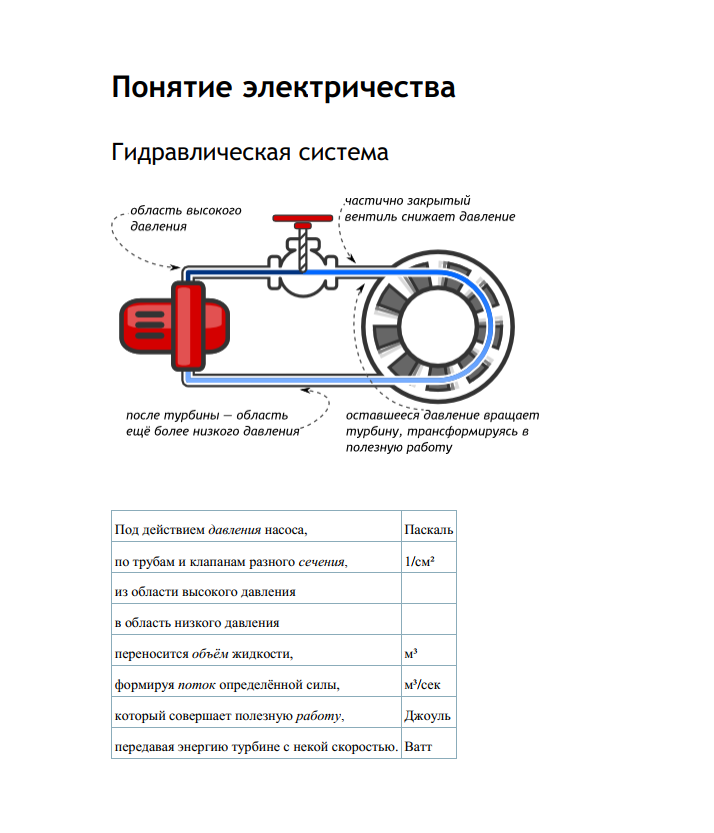
Гидравлическая система
- Принцип действия:
- Под действием давления насоса (Паскаль), жидкость перемещается по трубам и клапанам разного сечения (1/см²) из области высокого давления в область низкого давления.
- Это создает поток определенной силы (м³/сек), который совершает полезную работу (Джоуль), передавая энергию турбине с некоторой скоростью (Ватт).
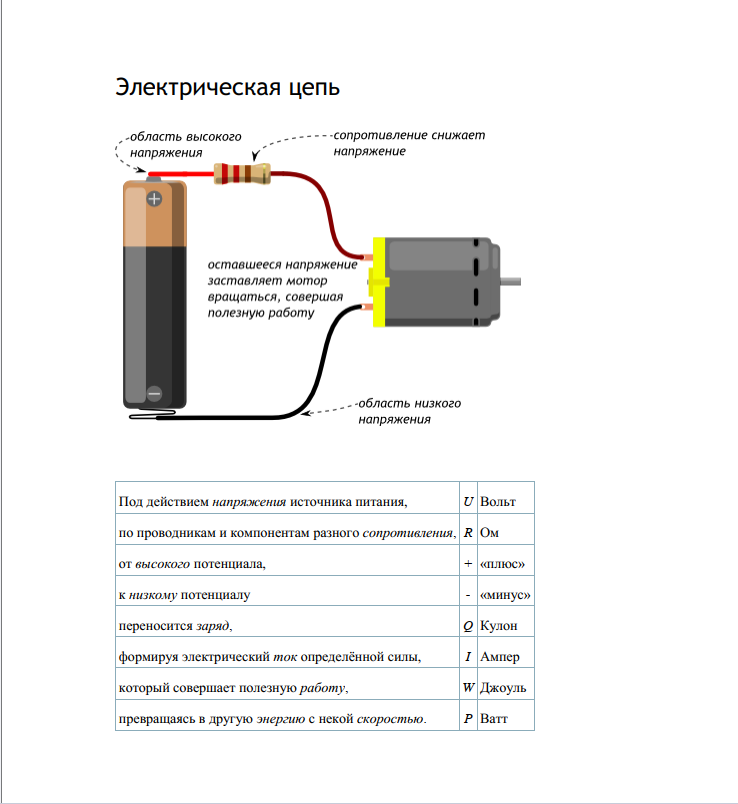
Электрическая цепь
- Принцип действия:
- Под действием напряжения источника питания (U Вольт), заряд перемещается по проводникам и компонентам разного сопротивления (R Ом) от высокого потенциала (+) к низкому потенциалу (-).
- Это формирует электрический ток определенной силы (I Ампер), который совершает полезную работу (W Джоуль), превращаясь в другие формы энергии с некоторой скоростью (P Ватт).
Принципиальные схемы
- Рисованная схема: Красиво, но громоздко и непрактично.
- Принципиальная схема: Компактно и наглядно, с использованием специальных символов для обозначения компонентов.
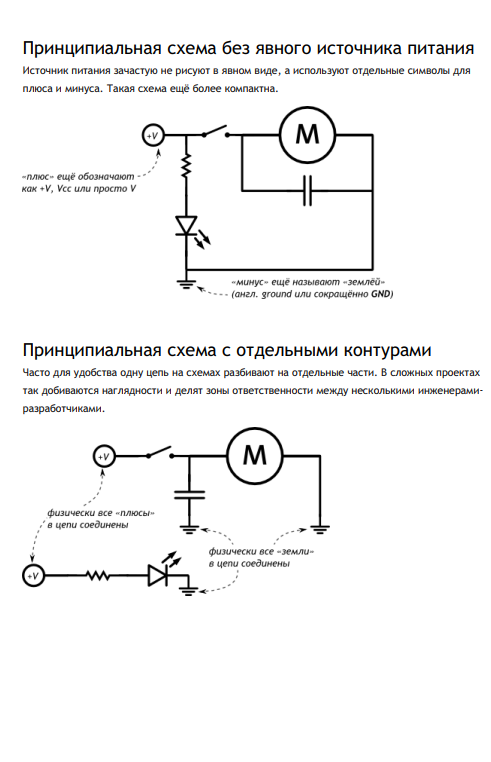
- Принципиальная схема без явного источника питания: Использует отдельные символы для обозначения плюса и минуса, более компактна.
- Принципиальная схема с отдельными контурами: Разбивает цепь на отдельные части для удобства и наглядности.
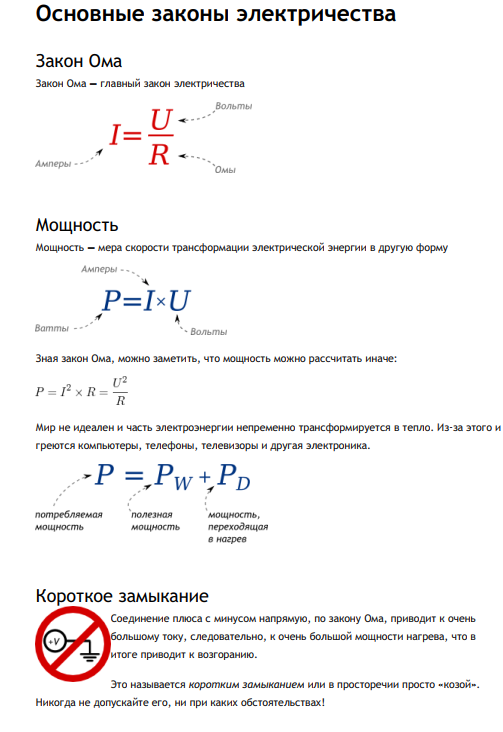
Основные законы электричества
- Закон Ома: Описывает взаимосвязь между напряжением, сопротивлением и током в электрической цепи.
- Мощность: Мера скорости трансформации электрической энергии в другие формы энергии.
- Короткое замыкание: Соединение плюса с минусом напрямую, что может привести к серьезным последствиям в виде большого тока и нагрева.
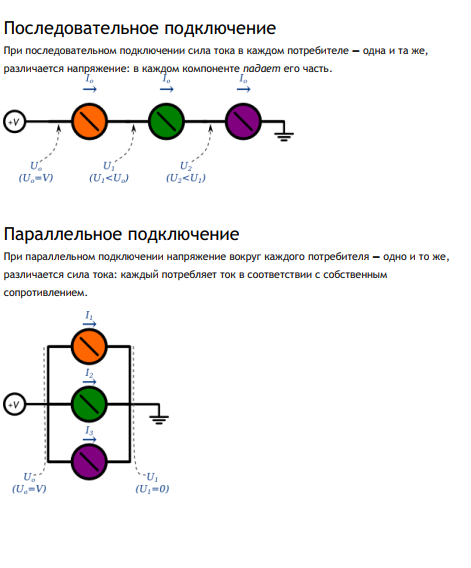
Последовательное и параллельное подключение
- Последовательное подключение:
- Сила тока в каждом потребителе одинакова, различается только напряжение, так как в каждом компоненте падает его часть.
- Параллельное подключение:
- Напряжение вокруг каждого потребителя одинаково, различается только сила тока, поскольку каждый потребитель потребляет ток в соответствии с собственным сопротивлением.
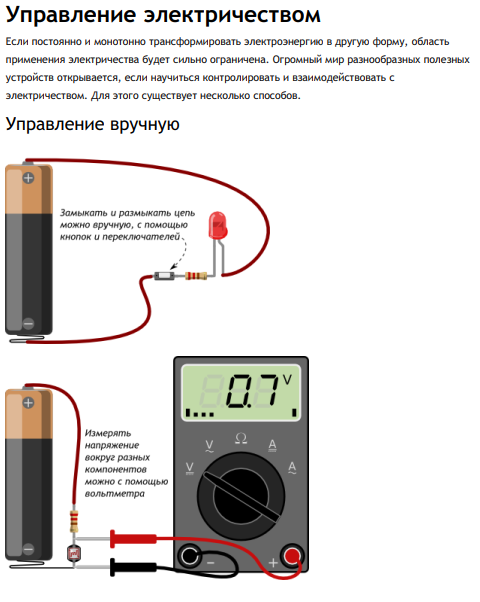
Управление электричеством
- Управление вручную:
- Замыкание и размыкание цепи, измерение напряжения могут быть выполнены вручную.
- Автоматическое управление:
- Может быть выполнено автоматически, по заданному алгоритму, при помощи запрограммированного микроконтроллера.
- Для этого существуют готовые платы, такие как Arduino, которые упрощают процесс взаимодействия с микроконтроллером.
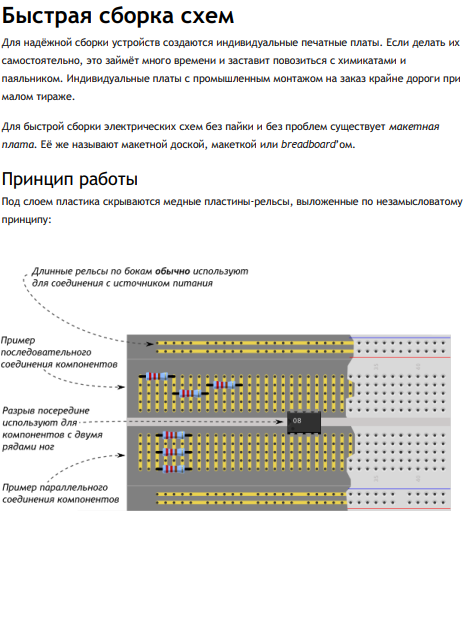
Быстрая сборка схем
- Индивидуальные печатные платы:
- Создаются для надежной сборки устройств, но могут быть дорогими и требовать много времени.
- Макетная плата:
- Или breadboard – позволяет быстро собирать электрические схемы без пайки и проблем.
Конденсатор
- Основные характеристики:
- Ёмкость (номинал) C в Фарадах.
- Точность (допуск) в %.
- Максимальное напряжение V в Вольтах.
- Поведение:
- Конденсатор заряжается, если подаваемое напряжение больше его внутреннего, и разряжается, если внешнее напряжение меньше.
- Время заряда и разряда:
- Определяется понятием «постоянной времени τ», за которую конденсатор заряжается или разряжается на определенный процент.
Резистор
- Основные характеристики:
- Сопротивление (номинал) R в Омах.
- Точность (допуск) в %.
- Мощность P в Ваттах.
- Цветовая кодировка резисторов:
- Номинал и допуск резистора кодируются цветными полосками, так как нанесение чисел на корпус дорого и непрактично.
Разные серии резисторов
- Принцип расшифровки полос: Разные серии резисторов могут содержать разное количество полос, но принцип расшифровки идентичен.
- Цвет корпуса: Цвет корпуса резистора (бежевый, голубой, белый) не влияет на его характеристики.
- Проверка полос с помощью мультиметра: Если нет уверенности в правильности расшифровки полос, можно использовать мультиметр для проверки.
Типовые номиналы для экспериментов
- Приведены типовые номиналы резисторов для проведения экспериментов с различными схемами.
Диод
- Основные характеристики: Диод – это электрический компонент с двумя полюсами: анод и катод. Пропускает ток только в одном направлении.
- Вольт-амперная характеристика: Описывает поведение диода при различных напряжениях.
- Виды диодов: Выпрямительный диод, Диод Шоттки, Диод Зеннера.
Светодиод
- Основные характеристики: Светодиод – это энергоэффективный источник света с различными характеристиками.
- Типовая схема включения: Показана типовая схема подключения светодиода с использованием резистора для ограничения тока.
- Поиск подходящего резистора: Приведены рекомендации по выбору резистора для оптимальной работы светодиода.
Кнопка
- Основные характеристики: Кнопка – это механизм, замыкающий цепь при нажатии.
- Эффект дребезга: Пояснено явление дребезга кнопки и предложены способы его учета при проектировании схем.
- Схема подключения: Приведены схемы подключения кнопки с использованием резисторов для стабилизации сигнала.
Светодиодные сборки
- Светодиодная шкала: Представляет собой группу светодиодов с различными характеристиками.
- Семисегментный индикатор: Восемь светодиодов в одном корпусе, используемых для отображения цифр и символов.
Установка на макетную плату
- Токоограничивающие резисторы: Рекомендуется использовать отдельный резистор для каждого светодиода, чтобы избежать неравномерной яркости.
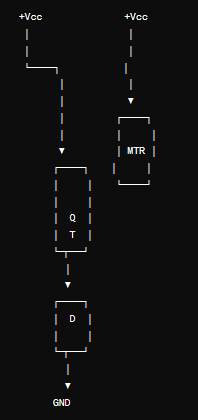
+Vcc– положительное напряжение питания (обычно 5 В или 12 В).GND– земля.Q– транзистор, такой как биполярный транзистор NPN или полевой транзистор MOSFET. Он управляет подачей напряжения на мотор.D– диод, обратно включенный параллельно мотору. Это предотвращает обратное напряжение, возникающее при выключении мотора, от повреждения других компонентов схемы.MTR– мотор, который нужно управлять.
При подаче логического сигнала (например, с микроконтроллера) на базу транзистора Q, транзистор открывается, и ток может протекать через него и мотор, включая диод. Когда логический сигнал отсутствует или низкий, транзистор закрыт, и диод предотвращает обратное напряжение от мотора.
Эта схема позволяет управлять направлением вращения мотора и предотвращает обратное напряжение от повреждения других компонентов схемы.
Битва роботов
соревнование между роботов и нанести больше урона противнику
проходить один раз в год
проходили в Великобритании с 1998
в США с 1994
Китай выйграл в 2023 выйгрышь 3млн
второе место DS Robotics из Индии 2Млн рублей
“ТурбоМехетроники” третье место 1 млн
Ура
робод запрограмирован на смерт
житкост покрасили в красный цвет
смысл как происходить внедрение в жизн
Jucke bots был музыкальным роботам
EMO робот мини человек может двиготся и делать эмоции может делать команды типо емо зделай из меня картинку может отоброжать эмоций и чуствовать разные прикосновение мини робот аснашён ИИ
робот Figure 01
начало разроботки 2022
машина которая ходить на двух ногах 5 прототипов было создано
весь 60 подёмност груза 20 кг
в 2023 втал в начале 2024 содруднечество с open AI
соревнуется с tesla optimus в скоросте разроботки
Робонавт
продвигает исследование космоса
гды работы 2004, 2010, 2011, 2012 робот был активирован на борту МКС
в 2024 ждать далнейщее развития робота
Moley Robotics зделала робота для готовки
разрабы говорять что он может научится взомимотействовать с кухонными приборами
был создан в 2015 в прадажу пашол в 2017
робот может гововит все блуда так же как и в ресторане
tim andres абучал робота для готовки
FFl firs lego league
была основана в 1998 году
первый сезон началься в 1998 – 1999 году
Robot pipper
дружилюбный робот
SoftBank Robotics была основана в 2012
известна своими человечискими роботами
знаеть 22 языка
Sofia это найболее впечетляющий технологя робота
сила в искуственном интелекте
понимаеть человечискую речь и отвечать
её код состовляет 70% от открытового источника
в 2018 получила способность ходить
в 2019 смогла нарисовать рисунак
Gemonoid HI-4
робот гемонойд имеет 16 степеней свободы движении
похожий на человека робот
Boston dynamics
создател Марк райберт
работал в НАСА 80 году
основанна 1992 году
первый робот был создан для военных целий в 2004 году
spot classic создан в 2015 году
spot выпущен в 2017 его можно купить за 75к доллоров
он используется например в стройтелстве или в спец оргонах
TALOS шагаюший робот
175см рост 95 кг рост
может держат в руках до 6 кг
может отслежывать поверхност
робот очень устойчевый к поверхности
This post is also available in ru_RU.